Auteur/autrice : Martial Barbera
Big GyroBot, un robot gyropode tout terrain entièrement basé sur un Raspberry pi 3
Le Big Gyrobot crée son propre hot-spot Wifi et se Pilote en FPV (retour vidéo) depuis un appareil Android.

GyroBot v2
Un robot gyropode basé sur un raspberry pi v2 et une carte Arduino Uno R3. Le Gyrobot v2 est une évolution du GyroBot mini
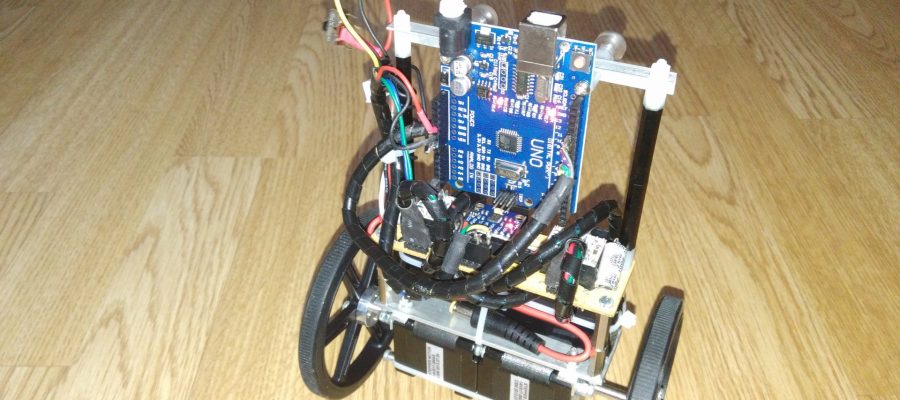
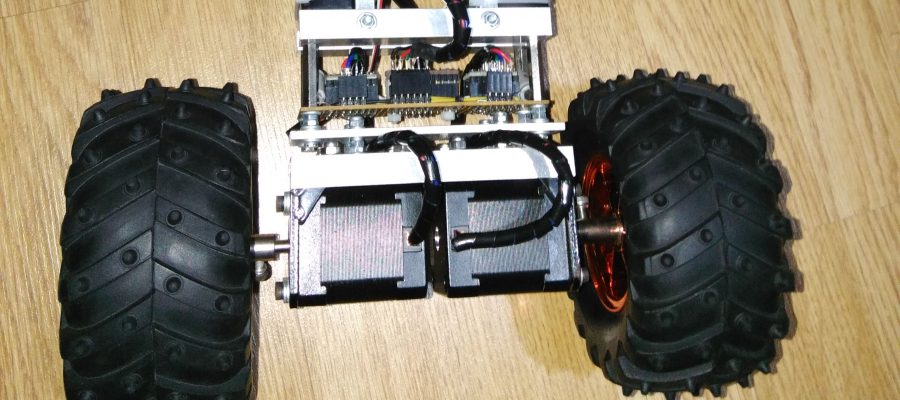
GyroBot mini, Un gyropode (self-balancing robot) piloté depuis une App Android. Basé sur une carte Arduino Uno R3
Le cerveau du robot est une carte Arduino Uno et un shield de ma conception, qui assure la gestion des communications avec une tablette ou un smartphone Android. La liaison entre le robot et l’application Android est faite grâce à